Полная версия:
Современные беспилотные летающие аппараты
Форма рамы. По расположению моторов относительно направления полета выделяют два основных типа рам: «+» и «X». Подвидом рамы типа «X» является рама типа «Н. Рама типа «Х» или «True-X», рис. 2.9.
Фюзеляж этой рамы делается коротким, в виде квадрата, вся электроника собирается в центре, а лучи располагаются четко по углам квадрата. Рама получается одинаковая по длине и ширине, так как вес сосредоточен в центре, вес распределен равномерно, коптер становится более маневренным. Но, несмотря на данное преимущество, ограниченное место в центре делает сборку более сложной. Все компоненты приходится размещать «бутербродом», друг под другом, что не всегда удобно. Также очевидное преимущество такой рамы – удобное расположение видеокамеры, когда лучи рамы не попадают в кадр. У рамы типа «X» более высокая устойчивость к мелким авариям. Наиболее частой аварией, особенно в период обучения, является цепляние земли при быстром наклонном пролете или «заруливании», либо падение под углом.

Рис. 2.9. Рама типа «Х»
Рама типа «+» В случае «+»-образной рамы весь удар чаще приходится на один луч, который сильно страдает, тогда как при распределении удара на два луча ущерб обычно ограничивается сломанными пропеллерами.
Кроме того, большинству пилотов психологически комфортнее управлять именно типом «X». В свою очередь, квадрокоптер с рамой типа «+» несколько быстрее и острее реагирует на команды «вправо-влево» и «вперед-назад», поэтому больше подходит любителям динамичного пилотирования.
Рама типа «+» не стала такой распространенной, как рама типа «Х» еще и из-за переднего пропеллера, который попадает в поле зрения камеры, что многим не нравится.
Рама типа «H» По сравнению с рамой «Х», центральная часть данной рамы более длинная, что делает сборку и ремонт проще и удобнее. Крепление лучей к фюзеляжу спереди и сзади делает раму похожей на букву «Н», рис. 2.10.
Камеру и аккумулятор в такой раме размещают по верхней пластине, распределяя все по одному направлению, что приводит к неравномерному распределению момента инерции, особенно по тангажу. То есть, наклоны вперед и назад будут тратить больше энергии, чем наклоны влево-вправо.
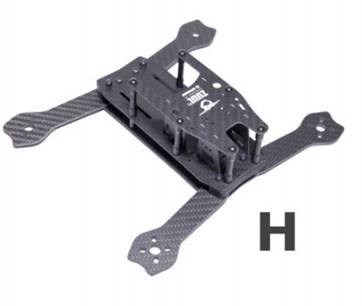
Рис. 2.10. Рама типа «Н»
Гибридная рама «Х». Гибридная рама «Х» имеет фюзеляж от рамы «Н», а лучи соединены как в раме «Х», рис. 2.11. С точки зрения физики, распределение веса осталось таким же, как и в раме «Н», что делает ее похожей на обычную раму «Н», но разница будет в распределении точек передачи вибраций от моторов к полетному контроллеру.

Рис. 2.11. Рама типа гибридный «Х»
Рама типа «Квадрат». Представьте раму «Х», где между лучами добавили соединяющие их ребра, рис 2.12.

Рис. 2.12. Рама типа «Квадрат»
За счет жесткости соединений получается рама, которую непросто сломать. Минус такой конструкции в повышенном воздушном сопротивлении и большем весе. Подходит для обучения начинающих пилотов, но не походит для маневренных полетов.
Unibody рамы или цельные рамы, составляют единую конструкцию с лучами, рис. 2.13. Делается так для того, чтобы упростить сборку, уменьшить вес и количество элементов крепления. Минус подобной рамы в не ремонтопригодности, так как при поломке одного луча придется менять раму целиком, а также полностью разбирать коптер.

Рис.2.13. Рама типа «Unibody»
Материал рамы. Рамы квадрокоптеров изготавливаются из самых разных материалов: пластик, дерево, текстолит, стекловолокно, алюминий и др. Однако фаворит среди рам для самостоятельной сборки –карбон (он же углепластик), рис 2.14.

Рис.2.14. Серийная рама из карбона
Рамы для совсем маленьких квадрокоптеров могут быть даже напечатаны на 3D принтере, рис. 2.15. В результате получится монолитная конструкция (которую, опять же, можно усилить ребрами жесткости). Однако для крупной конструкции с сильно выдающимися лучами такой способ производства рамы не подойдет из-за высокой гибкости пластика.

Рис.2.15. Рамы, напечатанные на 3D принтере
Защита квадрокоптера. Защитная конструкция квадрокоптеру нужна для защиты лопастей и моторов, потому что в случае падения удар приходится на винты, моторы и лучи, что приводит к их частой поломке. Конечно, наличие защиты приводит к увеличению веса и сопротивления воздуху, но именно она является гарантией безопасности квадрокоптера и его долговечности. Существует множество вариаций защиты, некоторые из них приведем ниже:
Дуговая защита. Являются самым простым и легким вариантом защиты, рис.2.16. Крепятся на лучах под моторами и защищают винты и моторы за счет своей упругости. Недостаток такой защиты в том, что если на пути коптера будет ветка или объект, который проходит между лучами, то коптер может врезаться собственным корпусом, что приведет к поломке электроники. Так же дуги плохо защищают моторы от попадания в них объектов сверху

Рис.2.16. Пример дуговой защиты
Корпусная защита. Корпусная защита крепится по всему корпусу квадрокоптера, защищая не только моторы, но и раму в целом, рис.2.17. По сравнению с предыдущим вариантом, данная защита более эффективна при прямых столкновениях коптера с объектами и стенами.

Рис.2.17. Пример корпусной защиты
Подвес и крепления к раме посадочного шасси. Когда речь заходит о коптере, на котором установлен подвес, например, с камерой, расположение шасси становится критическим вопросом. Опоры должны быть достаточно упругими, чтобы амортизировать приходящую на них нагрузку и вибрации после посадки, а их расположение на раме должно не приводить к поломке корпуса. Подвесы часто располагаются по центру рамы, либо выдвинутыми вперед. Есть насколько вариантов расположения шасси:
1.Крепление двух опор к фюзеляжу под углом. Популярный метод для больших грузоподъемных квадрокоптеров. Обычно расположены под углом относительно корпуса (около 30 градусов относительно вертикальной оси), создавая таким образом амортизационную подушку при посадке. Опоры крепятся по ширине фюзеляжа для равномерного распределения массы с обеих сторон, рис.2.18.

Рис. 2.18. Вариант широких посадочных опор
2.Крепление 4-х посадочных стоек к раме. Используются на средних коптерах, располагаются либо по 4-м сторонам фюзеляжа относительно крепления лучей, либо непосредственно под моторами, рис.2.19. Минус второго способа, что при достаточно жестком падении, такое расположение стоек приводит к поломке лучей. Поэтому расположение стоек непосредственно под корпусом рамы обладает большими шансами на предотвращение поломки рамы.

Рис. 2.19. Пример посадочных стоек
2.3. Винтомоторная группа
Винтомоторная группа, (ВМГ) – установка, создающая тягу, под воздействием которой винтовой летающий аппарат движется в требуемом направлении. В ВМГ входят двигатель, воздушный винт. Применительно к мультироторным БПЛА в ВМГ входят моторы и пропеллеры.
Мотор– это устройство, которое преобразует какой-либо вид энергии в механический и наоборот. Моторы на дронах представляют собой ключевой элемент, определяющий их производительность и функциональные возможности в воздухе. Обычно они бывают двух типов: коллекторные и бесколлекторные. Бесколлекторные моторы, также известные как бесщеточные, становятся всё более популярными благодаря своей высокой мощности, эффективности и долговечности. Они характеризуются надежностью и плавностью хода, что особенно важно для стабильного и плавного полета. Моторы имеют различные маркировки, включающие в себя информацию о диаметре, длине, количестве оборотов в минуту (об/мин), а также о максимальной мощности и энергопотреблении. Различные модели моторов могут иметь разные характеристики, такие как крутящий момент, вес, рабочее напряжение и эффективность, что позволяет выбирать оптимальный вариант в зависимости от требований к дрону и его назначения.
В каждой ситуации важен свой тип полета, который обеспечивается среди прочего за счет характеристик моторов.
Коллекторные моторы. Коллекторные моторы используются в основном на слабых дронах начального уровня. Дело в том, что они не могут развивать значительные обороты и мощность, а это значит у них будет маленькая подъемная сила. Они громоздкие и склонны к поломкам, так как у таких моторов больше трущихся деталей, рис, 2.20.
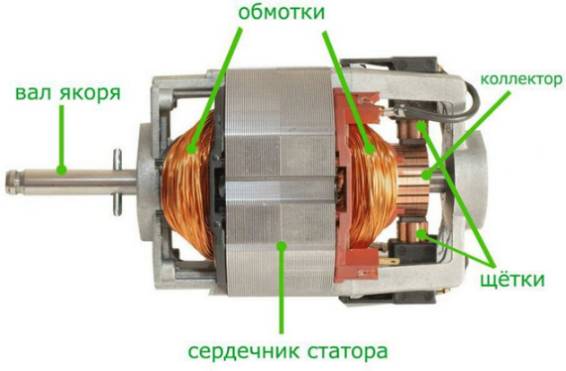
Рис. 2.20. Устройство коллекторного мотора
Коллекторный мотор состоит из корпуса, внутри него находятся магниты – плюс и минус, корпус неподвижен, а в движение приводится ротор с обмоткой с помощью щеток, которые подают электричество на обмотку. Преимущества: низкая стоимость, простота конструкции.
Недостатки: высокий уровень шумов при работе. Особенно на высоких скоростях. Щетки трутся о коллектор, дополнительно создавая шумы. Трение щёток приводит к их искрению и последующему износу. Нестабильность показателей при изменении нагрузки. Высокая частота отказов из-за наличия коллектора и щёток, малый срок службы этого узла, КПД около 65%
Бесколлекторные моторы. Все бесколлекторные (бесщеточные) моторы состоят из 4 компонентов: статор (обмотка), корпус, вал, неодимовые магниты, рис. 2.21.
Неодимовые магниты. Эти магниты из редкоземельных металлов генерируют фиксированное магнитное поле, они маленькие, но создают очень сильное магнитное поле. Они приклеены эпоксидной смолой или цианокрилатом к корпусу мотора (в сфере пилотов БПЛА прижился термин «колокол»).
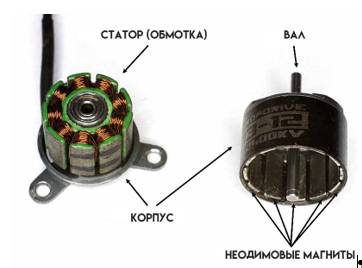
Рис.2.21. Бесколлекторный мотор
Корпус двигателя защищает магниты и обмотку. Обычно он изготовлен из легкого металла, такого как алюминий. Более продвинутые двигатели имеют корпусы, которые сделаны как вентиляторы, т.е. при вращении нагоняют воздух на обмотку сердечника, чтобы охлаждать ее. Вал мотора жестко прикреплен к верхней части. Это рабочий компонент мотора, который передает крутящий момент на пропеллеры.
Мотор Outrunner. В бесколлекторных моторах коммутация катушек происходит при помощи специальной электронной схемы – регулятора оборотов (Electronic Speed Controller, ESC). Независимо от количества катушек и схемы их внутренней коммутации бесколлекторный мотор всегда имеет три провода, подключаемые к регулятору. Таким образом, из конструкции мотора удаляется довольно сложный требующий обслуживания тяжелый и искрящийся узел – коллектор. Регулятор подает поочередно и в определенное время на эти провода питающее напряжение со сдвигом по фазе. Поскольку выводы катушек подключены к регулятору неразрывно, то катушки смонтированы неподвижно и являются статором, а вращается ротор с прикрепленными к нему постоянными магнитами. Направление вращения зависит от подключения выводов мотора к регулятору. Для изменения направления вращения достаточно поменять местами два любых вывода. В такой конструкции износу подвергаются только подшипники. И их можно менять.
Преимущества:
1.частота вращения изменяется в широком диапазоне;
2.возможность использования во взрывоопасной и агрессивной среде из-за отсутствия искр;
3. большая перегрузочная способность по моменту;
4.высокие энергетические показатели (КПД более 90 %);
5.большой срок службы, высокая надёжность и повышенный ресурс работы за счёт отсутствия скользящих электрических контактов.
Недостатки:
1.относительно сложная система управления мотором;
2.выше стоимость мотора, обусловленная использованием дорогостоящих материалов в конструкции ротора (магниты, подшипники, валы).
Бесколлекторный мотор бывает двух видов:
1.Inrunner. Мотор имеет расположенные по внутренней поверхности корпуса обмотки, и вращающийся внутри магнитный ротор.
2.Outrunner. Мотор имеет неподвижные обмотки, (внутри) вокруг которых вращается корпус с помещенным на его внутреннюю стенку постоянными магнитами (статор).
При сборке квадрокоптеров чаще всего применяется именно Outrunner.
Пропеллеры. Пропеллеры нужны для того, чтобы создать подъемную силу с помощью мотора, они непосредственно влияют на то, как себя будет вести квадрокоптер в воздухе. При выборе пропеллеров, нужно учитывать 4 основных момента: размер, шаг, конфигурация пропеллеров, материал (долговечность).
Размер – диаметр окружности, описываемой лопастями. Большой пропеллер будет проталкивать собой больше воздуха и будет тратить много энергии для вращения. Он будет затягивать изменение скорости вращения моторов, потому что большой и тяжелый. Преимущество больших пропеллеров заключается в хорошей тяге благодаря большой площади лопастей, он будет лучше держать дрон в воздухе.
Пропеллеры малого размера быстрее реагируют на изменение скорости вращения моторов. Они проталкивают через себя меньше воздуха, соответственно тратят меньше энергии при изменении скорости вращения. Пропеллеры должны соответствовать моторам, потому что, если мы поставим 3-дюймовые пропеллеры на двигатель, который рассчитан на 5 дюймовые пропеллеры, то это приведет к чрезвычайно высоким оборотам и большому потреблению энергии из-за маленькой нагрузки от пропеллеров, при этом тяга будет небольшая. Это не только неэффективно, но и очень быстро выведет мотор из строя (попутно прихватив с собой и регуляторы оборотов), так как он не рассчитан работать на таких оборотах.
Шаг – это угол наклона каждой лопасти пропеллера. Данный параметр прописывается производителем в дюймах и рассчитывается, как расстояние, которое может пройти винт за один оборот. Чем больше угол атаки (шаг) лопасти, тем больше это расстояние. Соотношение диаметра и шага винта должно быть сбалансированным. Меньший шаг винтов приведет к созданию большего крутящего момента и снижению потребляемой двигателями мощности. Если вы планируете использовать ваш квадрокоптер для аэробатики, вам просто необходимы пропеллеры с большим крутящим моментом. Они обеспечат большую скорость и меньшую нагрузку на источник энергии. Кроме того, пропеллеры с меньшим шагом увеличивают стабильность полета.
Пропеллер с большим шагом перемещает больший объем воздуха, что может вызвать турбулентность и привести к вибрации из-за ударов воздушных потоков от пропеллеров по лучам. Если это происходит, просто выберите несущие винты с меньшим шагом.
Пропеллер с большим шагом будет медленно реагировать на газ, потреблять больше энергии и будет максимально эффективным на больших оборотах.
Низкий шаг обеспечивает большой крутящий момент на малых оборотах, но у него небольшая тяга и максимальная конечная скорость.
Угол атаки-угол наклона лопасти относительно горизонтальной плоскости. Если конец лопасти будет иметь тот же угол атаки, что начало лопасти, то винт будет загребать воздух неравномерно, разбалансируя работу всей ВМГ и создавая вибрации.
Тяга лопастей -подъёмная сила, которая создаётся винтом. Масса воздуха, пройдя обметаемую площадь, получает ускорение, под действием силы, создаваемой винтом.
Конфигурация пропеллеров. Стандартные пропеллеры, используемые в квадрокоптерах, бывают: 2-лопастные, 3-лопастные, 4-лопастные, 5-лопастные, рис. 2.22.
Увеличение числа лопастей компенсирует размер пропеллера, особенно в микросборках. ведь если на маленький дрон на раме 100 мм поставить 2-лопастные пропеллеры, он вряд ли будет адекватно летать и это приведет к большим оборотам двигателей и их перегреву. Поэтому в микросборках всегда 4-лопастные пропеллеры, а на дронах чуть больше – уже 3-лопастные.

Рис. 2.22. Конфигурация пропеллеров
Из-за сложной физики и аэродинамики увеличение количества лопастей не так эффективно, как увеличение размера. Винт с удвоенным количеством лопастей не будет работать так же хорошо, как винт с удвоенным размером, но он обеспечивает большую тягу за счет большей мощности. Увеличение количества лопастей приведет к увеличению тяги и сцепления в воздухе за счет отзывчивости и увеличения потребляемой энергии. Меньшее количество лопастей предпочтительнее, если требуется более быстрый отклик двигателя, а тяга не так важна.
Материал, используемые для изготовления несущих винтов (пропеллеров), могут оказывать умеренное влияние на лётные характеристики, но безопасность должна быть главным приоритетом. Наиболее популярны пластиковые пропеллеры. Они отличаются пластичностью, низкой ценой, широким ассортиментом и высокой степенью доступности. С одной стороны, гибкость лопастей повышает их устойчивость к повреждениям, с другой – вызывает проблемы с балансировкой.
Углеродное волокно. Пропеллер изготовленный из углеродного волокна сложнее сломать или согнуть, и, следовательно, при краше, он нанесёт больший ущерб всему, с чем соприкоснётся. Одновременно с этим, карбоновые винты, как правило, хорошо сделаны, более жёсткие (обеспечивают минимальные потери в эффективности), редко требуют балансировки и имеют более лёгкий вес по сравнению с любыми другими материалами исполнения. К недостаткам материала можно отнести высокую стоимость.
Композит. Внутри пластик, снаружи покрытие из углеродного волокна. Дешевизна пластика, жёсткость и износостойкость соотносима с карбоновыми пропеллерами.
Фиброармированный полимер (углеродное волокно, нейлон, усиленный карбоном и т.д.)– является «передовой» технологией во многих отношениях.
Выбор материала пропеллеров зависит и от времени года. Пластмассы для пропеллеров термопластичны, то есть, их жесткость и пластичность зависит от температуры. Зимой лучше ставить пропеллеры из АБС-пластика (полимеризация акрилонитрила, бутадиена и стирола), так как поликарбонат на холоде дубеет и становится хрупким. В жару лучше использовать пропеллеры, армированные стекловолокном для хорошей жесткости, так как АБС и поликарбонат будут становиться мягкими под действием жары от солнца и дрон потеряет тягу.
Схема установки пропеллеров. Прежде, чем устанавливать пропеллеры на квадрокоптер, нужно узнать, в правильную ли сторону будут крутиться моторы. Большинство квадрокоптеров летает на классической конфигурации, где передние пропеллеры крутятся в сторону камеры. Классическая схема кручения пропеллеров представлена на рис.2.23.
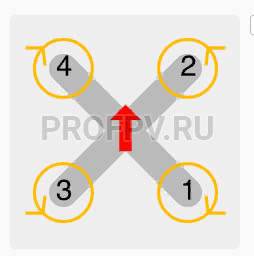
Рис. 2.23. Классическая схема кручения пропеллеров
В России всё чаще используется реверсивная схема – это когда передние пропеллеры вращаются наружу. Такая конфигурация защищает камеру от дорожной пыли во время взлета и посадки коптера.
2.4. Источники энергии БПЛА
В настоящее время электродвигатели являются самым распространённым решением для малых БПЛА, источниками энергии для которых обычно являются электрические аккумуляторы, фотоэлектрические модули, топливные элементы.
Большинство небольших БПЛА, особенно квадрокоптеров, работают на батарейных системах. Решения на базе аккумуляторов способны закрыть основные потребности гражданского сегмента в плане длительности полёта, стоимости и гибкости. Наибольшее время полёта (до 1,5 ч) обеспечивают литий-полимерные аккумуляторы, которые, к примеру, для микро-беспилотников весят менее 2 кг. Также применяются литий-ионные, никель-кадмиевые, никель-марганцевые, литий-серные, свинцово-кислотные и иные накопители. Эти аккумуляторы уступают литий-полимерным по плотности энергии, экономии массы и другим характеристикам.
Недостатками аккумуляторного типа энергоснабжения являются ограничения по накопленному запасу энергии, что значительно сужает время функционирования БПЛА. Для устранения этой проблемы и обеспечения возможности выполнять длительные миссии используется несколько решений, связанных с различными способами подзарядки аккумуляторов. Так, подзарядка аккумуляторов БПЛА методом подкачки может проводиться средствами либо холодной подкачки, либо горячей замены. Оба этих способа предполагают посадку БПЛА на наземную зарядную станцию, но при холодной подкачке аккумулятор подключается к зарядке, и сам аппарат остаётся на месте на всю продолжительность этого процесса, а при горячей замене разряженный аккумулятор извлекается из продолжающего работать БВС, и на его место устанавливается полностью заряженный, заранее подготовленный на станции.
Таким образом, при расположении зарядных станций вдоль траектории движения БВС появляется возможность обеспечения длительного времени полёта, но существуют определённые риски безопасности аппаратов при взлёте со станций посадке на них. Эти риски устраняются при использовании беспроводной лазерной подзарядки, которая, однако, ограничивает расстояние и высоту полёта зоной вокруг радиуса распространения светового луча, передаваемого лазерным генератором на наземной станции.
Лазеры большой мощности используют лазерный луч для передачи энергии от наземной части комплекса на борт БПЛА. Автоматика комплекса должна следить за беспилотником и направлять луч точно на его солнечную панель, обеспечивая постоянное энергоснабжение и подзарядку батареи.
В настоящий момент развиваются несколько направлений технологии беспроводного энергоснабжения, но одной перспективной для беспилотной летательной техники является технология беспроводной передачи электрической энергии инфракрасным излучением. Основные преимущества – высокая эффективность тракта передачи энергии (до 40%), возможность использования небольших по размерам приемников (до 100 мм в диаметре), масса которых может не превышать 0,1 кг.
В настоящее время разработана система беспроводной зарядки в воздухе, которая может заряжать сразу несколько дронов. Создание достаточного количества этих станций может привести к появлению целой армии беспилотников, Зарядное устройство выглядит достаточно просто: это шестиугольная рама из проводов на опорах диаметром примерно 10 метров. При включении оно создает электромагнитное поле в воздухе в площади станции. Дрон, оснащенный специальными антеннами, заряжается, пролетая в зону действия энергетического облака. Такое зарядное устройство может передать до 12 киловатт мощности при КПД около 80 процентов – восьми минут зарядки будет вполне достаточно для того, чтобы дрон продержался в воздухе около получаса.
Фотоэлектрические модули. Установка модулей солнечной генерации непосредственно на летательные аппараты позволяет энергии солнца обеспечивать полёт в течение периодов максимальной солнечной активности, а аккумуляторы с накопленной в эти периоды энергией – в отсутствие инсоляции. Такая система увеличивает время полёта. Однако, она имеет такие ограничения, как:
–сложность системы, приобретаемая вследствие необходимости установки на БВС преобразователей, контроллеров, сенсоров и иного оборудования;
–непостоянный характер выработки энергии от солнечной радиации
–непригодность для малых БВС, во многом из-за потребности в увеличении размеров крыла для того, чтобы на них можно было расположить достаточное количество фотоэлектрических модулей.
Топливные элементы. Беспилотные воздушные суда, использующие водородные топливные элементы, могут работать в течение нескольких часов вместо нескольких минут у аккумуляторных БВС. Топливные элементы превосходят батареи по удельной мощности, поэтому их следует рассматривать как предпочтительное решение для обеспечения большей «выносливости» при ограниченной массе. Кроме того, процесс дозаправки осуществляется практически мгновенно, что снимает проблему простаивания БВС, а энергопотери при передаче энергии сокращаются.
При применении топливных элементов существует несколько негативных факторов, которые необходимо учитывать:
–водород имеет плотность всего 0,089 кг/м3 при стандартной температуре и давлении –соответственно, чтобы БВС мог перевозить достаточное количество топлива, баки должны быть очень громоздкими;

